ClarifEYE
This project introduced me to networks, and the significance of reducing latency for such time-sensitive systems. Such a project opened my eyes into how costly great ideas are in terms of energy needed for real-time performance in both edge (cars in this case) devices and servers (that would be making the 3D maps), leading me into research. It was one of the most valuable experiences I’ve had and one that I want to continue after my studies.

I never knew I’d do something related to a start-up, but I had a lot of time in my hands during military. I got a group of friends from KATUSA who were also interested, and thought it was interesting to look into autonomous vehiles. Their sensors collect a lot of 3D data regarding the car’s environment, but it wasn’t used for any collective means. In other words, we proposed a start-up idea of using the LiDAR sensors from self-driving vehicles to create a cloud-based 3D map, that could be used for accurate, real-time mapping of areas, providing a collective understanding of paths and thus more data for autonomous vehicles. We hoped that this technology could reduce accidents caused by the low accuracy and precision of autonomous vehicles’ map understanding.
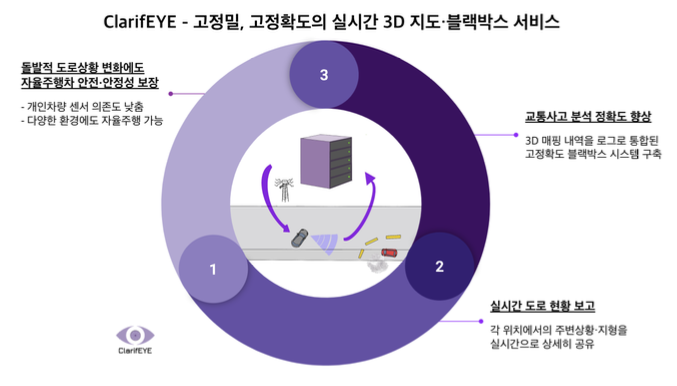
This is the general idea of our system design: Using LiDAR and in-Vehicle High Resolution Cameras to Construct a Dynamic 3D Mapping Cloud for Autonomous Vehicles (AV)
- LiDAR technology uses laser rays to measure the distance from the source;
- Create a shared 3D map of the streets or roads in a cloud that is shared amongst other AV
- With more AVs using this technology, the dataset gathered by LiDAR sensors is further improved and makes the 3D map more accurate
- Along with the in-vehicle high resolution camera, the categorized signs and their meaning is stored with the 3D map
- Adverse weather conditions can hamper the sensors used in the AVs, but with this dynamic cloud 3D map, the vehicle may not have to only rely on real-time fed data to be aware permanent obstacles in the road (like trees, building etc.)
- If an accident has occurred in the road/street captured by the camera, this news is shared amongst other AVs so they could avoid the street and find a more efficient route
- These 3D maps can also be used to improve the accuracy of 3D maps publicly available (these publicly available 3D maps are all drawn by airplanes and the dimension of the buildings are approximated through depth sensors)
The whole process isn’t fully recorded but we met up once every week to discuss our plans, make a business model, and finally present. Got 10th out of 600 teams, winning us the Personnel Commander Award. Check out our final presentation and submission: ClarifEYE Business Plan